|
|
|
|
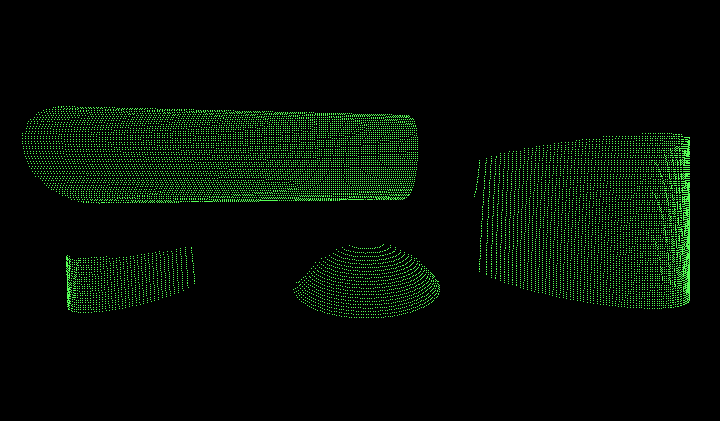
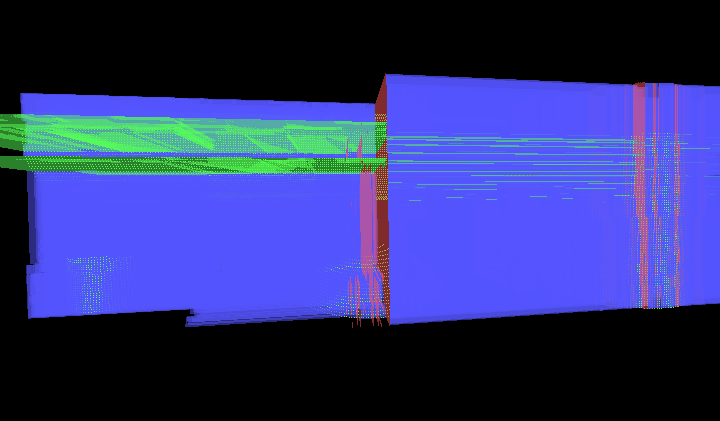
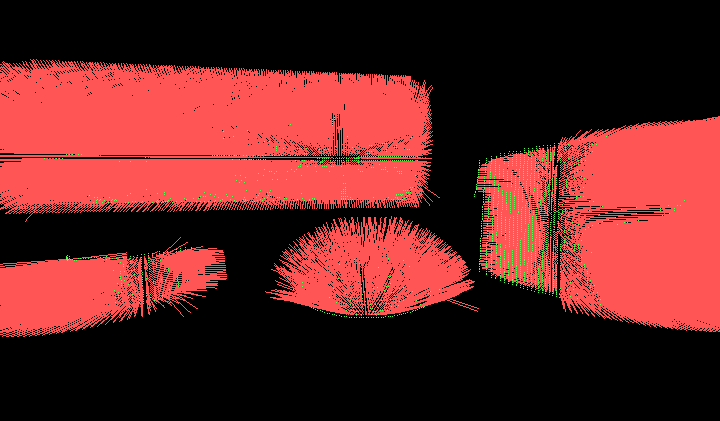
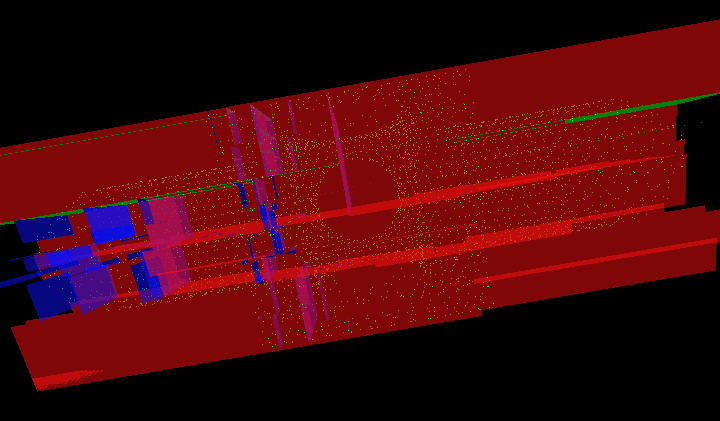
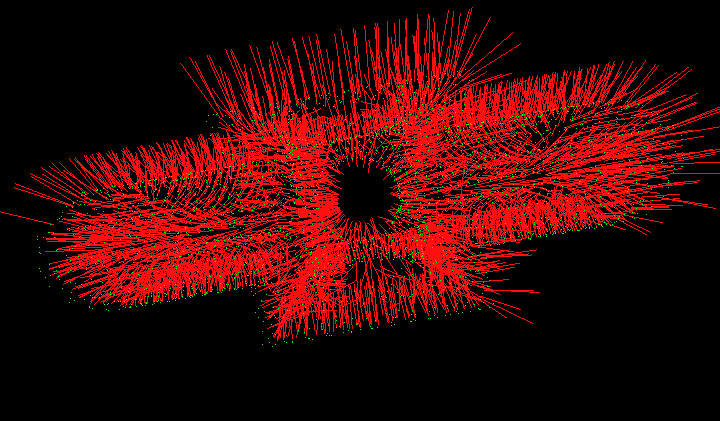
| Figure 1: conics.15887.pts data | Figure 2: kd-tree | Figure 3: tangent plane normals | |
|
|
|
|
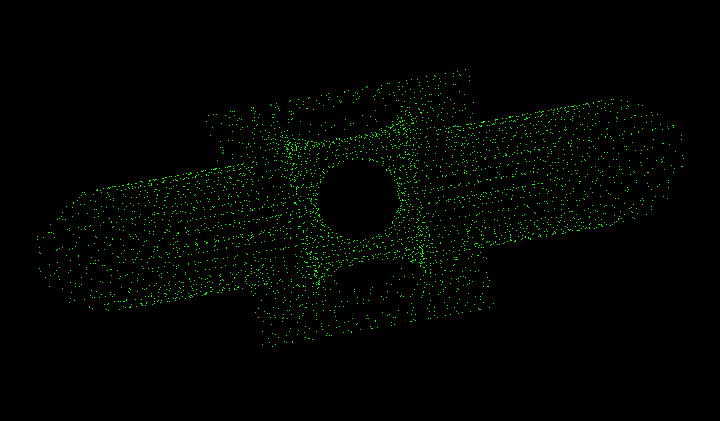
| Figure 4: mechpart.4102.pts data | Figure 5: kd-tree | Figure 6: tangent plane normals | |
- Read in a list of 3D points (xi = (x,y,z))
- Use the conics.15887.pts or mechpart.4102.pts input file (see Figure 1).
- Find the point cloud bounding box: two points
minandmaxwith the minimum and maximum coordinates of the point cloud, respectively. - Create a kd-tree on the points (see Figure 2).
- For each point xi
compute its tangent plane esimate
Tp(xi):
- Obtain Nbhd(xi), the k-nearest neighbours of point xi; use k = 5.
- Calculate the mean oi of Nbhd(xi).
- Perform Principal Component Analysis on each Nbhd(xi) by calculating and sorting the eigenvalues & eigenvectors of the neighborhood.
- Set the normal ni to the eigenvector associated with the smallest eigenvalue: the normal represents the orientation of the tangent plane at the neighborhood centroid, or origin, or mean, oi (see Figure 3).
- Store all of
Nbhd(xi),
oi, and
ni
in an instance of a new
TangentPlaneobject, and add its pointer to a list (STLvector) of pointers toTangentPlane.
- You now should have a list of tangent plane estimates at each point: Tp(xi).
- Output your normals to a plain text file in the following
format:
o0
n0
o1
n1
...
on
nn
where each oi, ni is the center and normal of tangent plane Tp(xi). - Sample output can be found here: conics.15887.tp.
- You can view your output with the
kdtreeprogram. Load your tangent plane file and then check the "Normals" checkbox in the View menu. The program was last compiled on a Linux PC running Fedora Core 3 with g++ v3.4.3 and so should run on most of the FX net Linux boxes (but not on the Suns).
Usage:- left mouse: move camera in xy-plane (up/down, left/right)
- scroll mouse: truck in and out (along camera's view-axis)
- CTRL-left mouse: yaw/pitch camera
- CTRL-scroll mouse: roll camera
phase1.tar.gz) including:
READMEfile containing assignment and solution descriptions, e.g., program design, description of algorithm, etc., if appropriate.INSTALLfile containing any specific compliation quirks peculiar to your program, e.g.,
Compilation:make.USAGEfile containing any specific usage quirks peculiar to your program, e.g.,
Usage:./phase1 < conics.15887.ptswhere./phase1is the executable andconics.15887.ptsis the input.src/directory with source code.