- a neighbourhood of points defining the tangent plane's neighborhood, Nbhd(xi),
- the tangent plane origin, oi, and
- the tangent plane's orientation represented by its normal, ni,
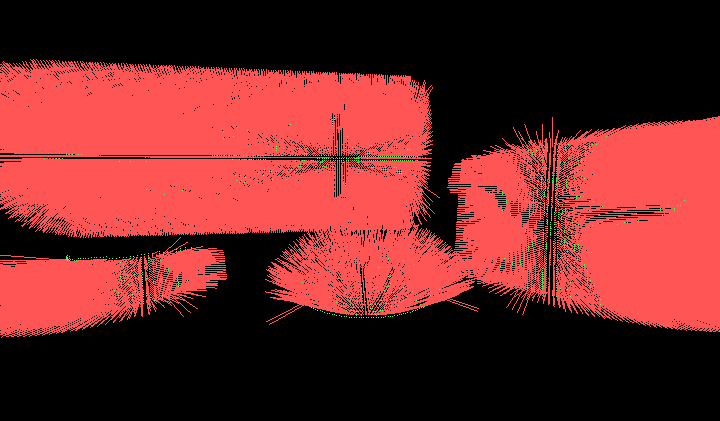
conics.15887.pts |
|
|
|
| Figure 1: consistent
Tp(xi).n
( binheap) |
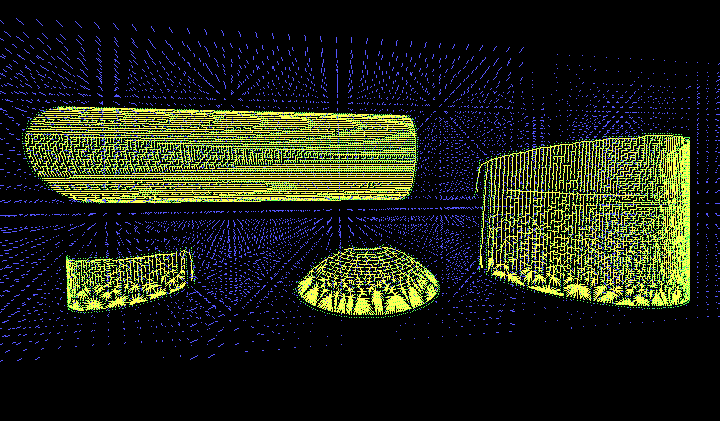
Figure 2: f(p)
at
marching cube verteces |
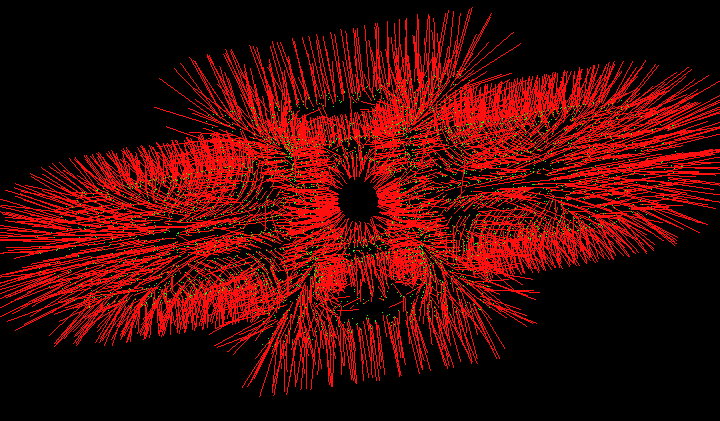
mechpart.4102.pts |
|
|
|
| Figure 3: consistent
Tp(xi).n
( binheap) |
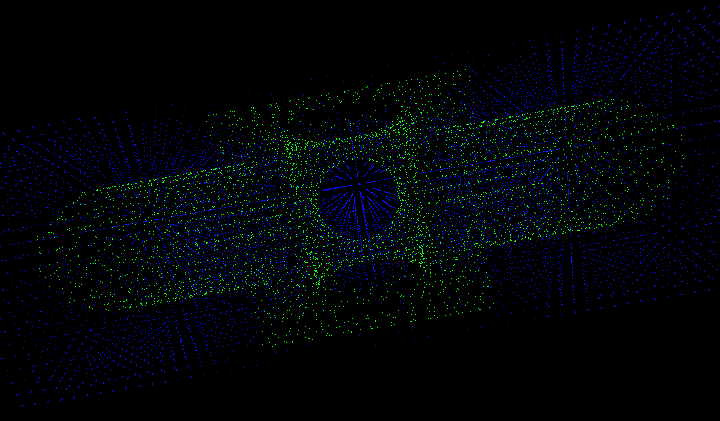
Figure 4: f(p)
at
marching cube verteces |
- Construct and iterate through a (virtual) 3D grid within the
given object's bounding box, incrementing by some
small amount, e.g., Δ = 0.01 for
mechpart, Δ = 0.21 forconics. Note that for f×r×c cubes, there'll be (f+1)×(r+1)×(c+1) verteces. - For each vertex point pi:
- Find the cloud point nearest to the vertex.
- Obtain the nearest neighbor point's tangent plane, Tp(xi) (which should be stored in the nearest neighbor point's data structure as a pointer to a tangent plane object).
- Obtain the tangent plane's center, oi.
- Obtain the tangent plane's normal, ni.
- Compute f(pi) = (pi - oi) ⋅ ni.
- Compute zi = oi - f(pi) ni.
- Compute the Euclidean distance between zi and its nearest cloud point. If this distance is greater than rho, consider f(pi) undefined.
- Store f(pi).
- You now should have a list of verteces with the signed distance function f(p) value at each vertex. This is referred to as the field data.
- Output your field data to a plain text file in the following
format:
cube[0].p0 f(cube[0].p0)
cube[0].p1 f(cube[0].p1)
cube[0].p2 f(cube[0].p2)
cube[0].p3 f(cube[0].p3)
cube[0].p4 f(cube[0].p4)
cube[0].p5 f(cube[0].p5)
cube[0].p6 f(cube[0].p6)
cube[0].p7 f(cube[0].p7)
...
cube[n-1].p0 f(cube[n-1].p0)
cube[n-1].p1 f(cube[n-1].p1)
cube[n-1].p2 f(cube[n-1].p2)
cube[n-1].p3 f(cube[n-1].p3)
cube[n-1].p4 f(cube[n-1].p4)
cube[n-1].p5 f(cube[n-1].p5)
cube[n-1].p6 f(cube[n-1].p6)
cube[n-1].p7 f(cube[n-1].p7)
where each of the cube's verteces, cube[i].pj is a 3D point and f(cube[i].pj) is the point's signed distance (a float). - Sample output can be found here:
conics.15887.field,mechpart.4102.field. - You can view your output with the
kdtreeprogram. Load your field file to view it. You can then check the "field" checkbox in the View menu to see the signed distance at each vertex. The program was last compiled on a Linux PC running Fedora Core 3 with g++ v3.4.3 and so should run on most of the FX net Linux boxes (but not on the Suns).
Usage:- left mouse: move camera in xy-plane (up/down, left/right)
- scroll mouse: truck in and out (along camera's view-axis)
- CTRL-left mouse: yaw/pitch camera
- CTRL-scroll mouse: roll camera
phase3.tar.gz) including:
READMEfile containing assignment and solution descriptions, e.g., program design, description of algorithm, etc., if appropriate.INSTALLfile containing any specific compliation quirks peculiar to your program, e.g.,
Compilation:make.USAGEfile containing any specific usage quirks peculiar to your program, e.g.,
Usage:./phase3 < conics.15887.ptswhere./phase3is the executable andconics.15887.ptsis the input.src/directory with source code.