- a neighbourhood of points defining the tangent plane's neighborhood, Nbhd(xi),
- the tangent plane origin, oi, and
- the tangent plane's orientation represented by its normal, ni,
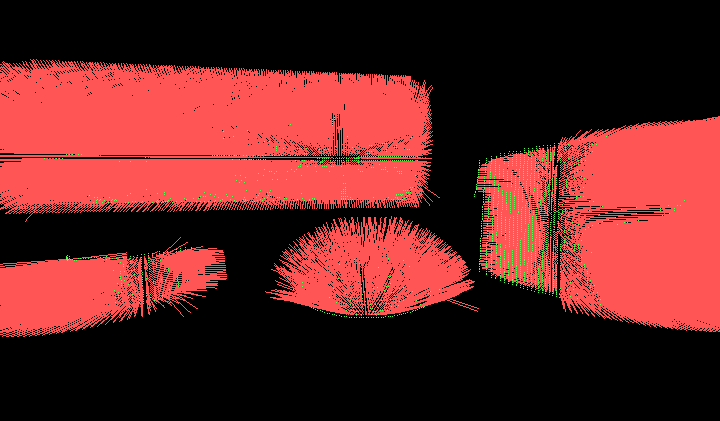
conics.15887.pts |
||
|
|
|
| Figure 1: tangent plane normals (Tp(xi).n) |
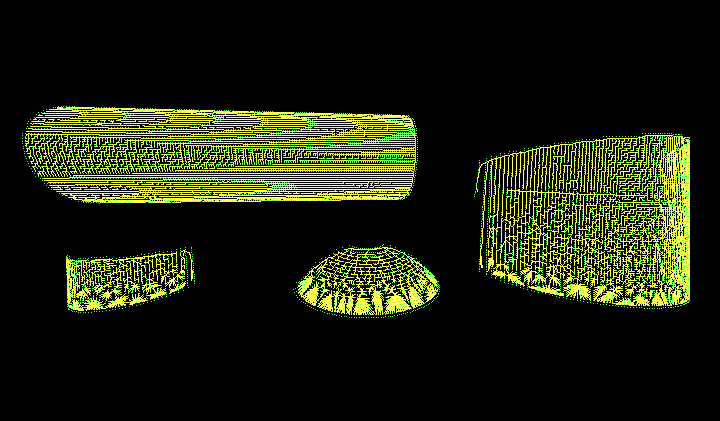
Figure 2: connected components (EMST forest, binheap) |
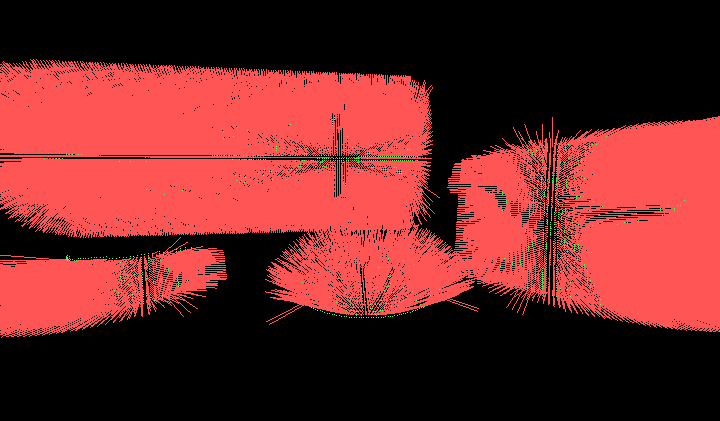
Figure 3: consistent
Tp(xi).n
( binheap) |
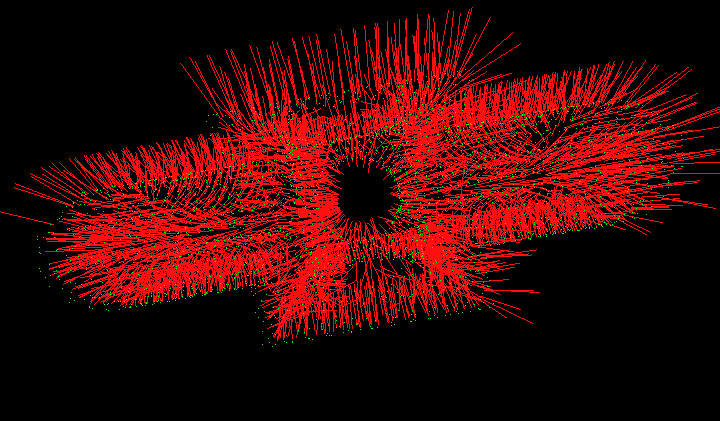
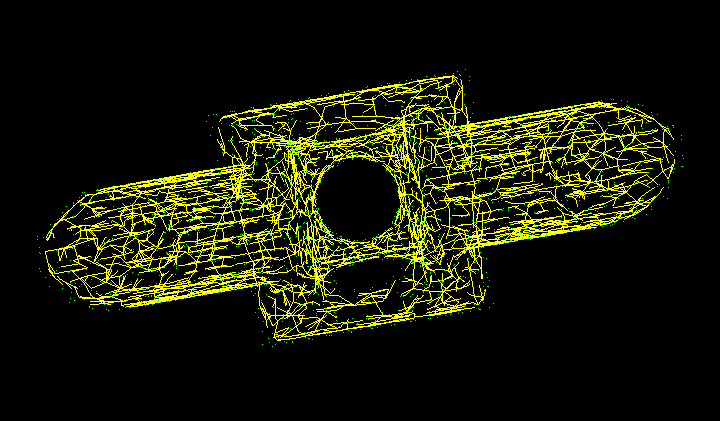
mechpart.4102.pts |
||
|
|
|
| Figure 4: tangent plane normals (Tp(xi).n) |
Figure 5: Reimannian graph
(MST, binheap) |
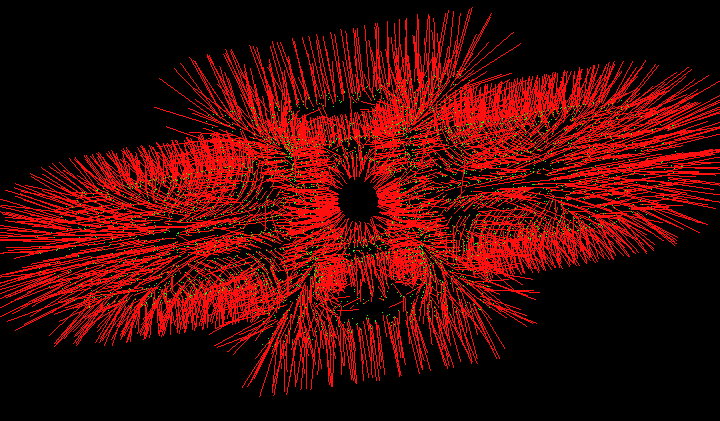
Figure 6: consistent
Tp(xi).n
( binheap) |
- Construct a graph, G = (V,E),
where
- each vertex v corresponds to the origin of each Tp(xi), and
- each edge is defined as
e =
(Tp(xi),
Tp(xj)),
i != j.
For the
mechpart.4102.ptsdata, only include the edge if the distance between tangent plane centers is "sufficiently close", meaning that the edge is added only if oi is in the k-neighborhood of oj and vice versa (this differs slightly from Hoppe's SIGGRAPH paper but is an easy check: the distance between oi and oj should be smaller than both radii of each of the tangent plane's k-neighborhood).
- Implement Prim's algorithm to generate the Euclidean
Minimum Spanning Tree (see Figure 2).
- Use the Tp(xi) with the largest z-coordinate as the MST root.
- When executing Prim's algorithm, use a binary
heap as a priority queue (minheap) of unprocessed
graph verteces, where the node comparison criteria
is the Euclidean distance between graph nodes
(For
mechpart.4102.ptsdata, use the cost 1 - |ni ⋅ nj|.) - When traversing graph nodes to build the MST, delete
any edges longer than an arbitrarily chosen value
rho. For the
conics.15887.ptsinput file, use rho = 1.0. - You should now have a set of connected components.
- Traverse each EMST to enforce consistent tangent plane
orientation:
- Force each EMST root node's normal to point toward the positive z-axis.
- Traverse each EMST in depth-first order, assigning each plane an orientation that is consistent with that of its parent, i.e., if during traversal Tp(xi) has been assigned the orientation ni, and Tp(xj) is the next plane to be visited, then nj is replaced with -nj if ni ⋅ nj < 0.
- You now should have a list of tangent plane estimates at each point: Tp(xi), all consistently oriented within each connected component (see Figure 3).
- Output your normals to a plain text file in the following
format:
o0
n0
o1
n1
...
on
nn
where each consecutive pair of values oi, ni, oi+1, ni+1 are the verteces and (consistent) vertex normals. (Note that the oi and ni are just the tangent plane centers and normals.) - Sample output can be found here: conics.15887.emsf.
- You can view your output with the
kdtreeprogram. Load your EMSF file to view it. You can then check the "Normals" checkbox in the View menu to see the consistently oriented normals. The program was last compiled on a Linux PC running Fedora Core 3 with g++ v3.4.3 and so should run on most of the FX net Linux boxes (but not on the Suns).
Usage:- left mouse: move camera in xy-plane (up/down, left/right)
- scroll mouse: truck in and out (along camera's view-axis)
- CTRL-left mouse: yaw/pitch camera
- CTRL-scroll mouse: roll camera
- Expected running time (best recorded single runs) can be found here.
phase2.tar.gz) including:
READMEfile containing assignment and solution descriptions, e.g., program design, description of algorithm, etc., if appropriate.INSTALLfile containing any specific compliation quirks peculiar to your program, e.g.,
Compilation:make.USAGEfile containing any specific usage quirks peculiar to your program, e.g.,
Usage:./phase2 < conics.15887.ptswhere./phase2is the executable andconics.15887.ptsis the input.src/directory with source code.